
Calibration of an Inertial Measurement Unit (IMU) with Raspberry Pi - Part I
Inertial measurement units (IMUs) can consist of a single sensor or collection of sensors that capture data meant to measure inertial movements in a given reference frame. Acceleration, speed of rotation, and magnetic field strength are examples of sensors contained in an IMU. IMUs can be found in applications ranging smart devices, medical rehabilitation, general robotics, manufacturing control, aviation and navigation, sports learning, and augmented and virtual reality systems. Inertial measurement units have become increasingly popular as their form factors shrink and computational power increases. The ability to use IMUs for indoor/outdoor tracking, motion detection, force estimation, orientation detection, among others has caused the use and availability of inertial sensors to become nearly widespread in smart phones, smart watches, drones, and other common electronic devices. The internet is full of projects involving accelerometers, gyroscopes, and magnetometers, but few cover the full calibration of all three sensors. In this project, the manual calibration of a nine degree-of-freedom (9-DoF) IMU is explored. A common MPU9250 IMU is attached to a cube to manually find the calibration coefficients of the three sensors contained within the IMU: accelerometer, gyroscope, and magnetometer. The IMU is wired to a Raspberry Pi - which will allow for high-speed data acquisition rates of all nine components of the IMU.
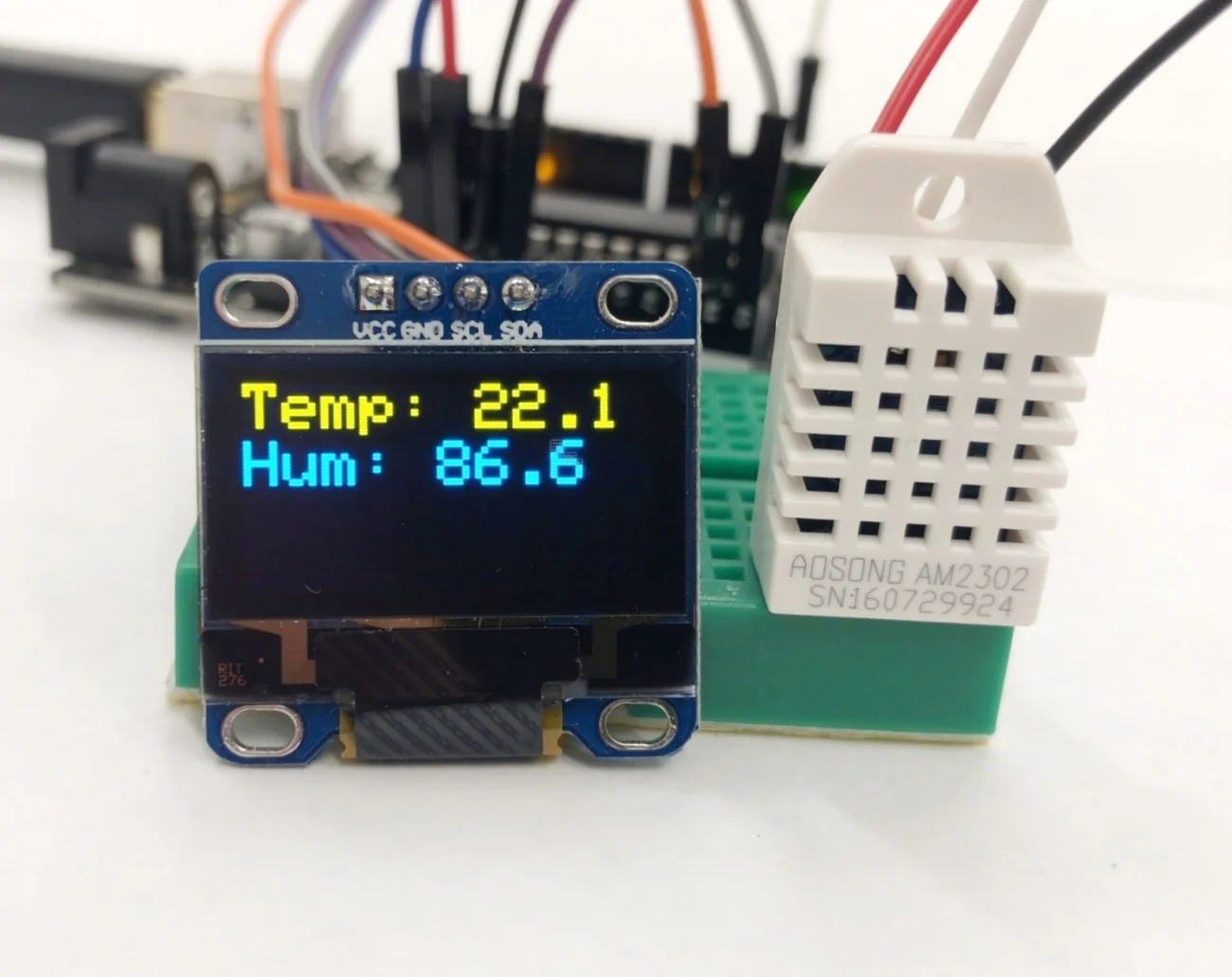
Arduino I2C OLED Display - Temperature and Humidity Display (SSD1306)
How to print temperature and humidity readings onto a 0.96 inch I2C OLED display. The device is DIYMall's inexpensive, high resolution (128x64 pixels), yellow and blue organic LED display that is designed for use with the Arduino platform. Together with a DHT22 temperature sensor, the tiny OLED screen will display real-time humidity and temperature data using an Adafruit library and an Arduino Uno board. This project can be expanded upon to print data from a wide array of sensors, and even grab data from the internet to print values for a smart and interactive display.